概述
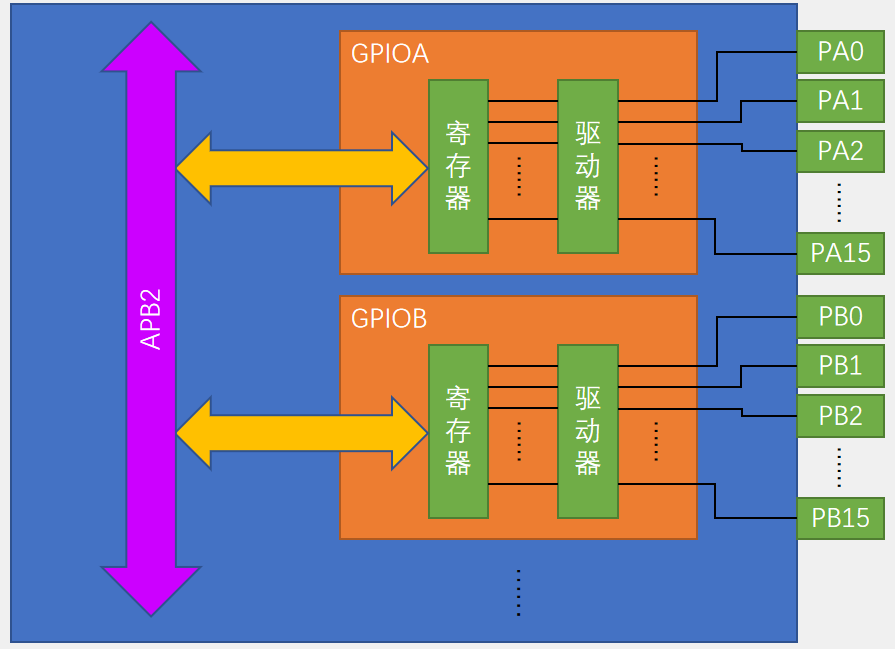
GPIO,即通用 I/O(输入/输出)端口,是 STM32 可控制的引脚。STM32 芯片的 GPIO 引脚与外部设备连接起来,可实现与外部通讯、控制外部硬件或者采集外部硬件数据的功能。STM32F103 有 3 组 IO。分别为 GPIOA~GPIOC,每组 IO 有 16 个 IO 口,共有 48 个 IO 口。通常称为 PAx、PBx、PCx,其中 x 为 0-15,并且 F1 系列是基于 Cortex-M3 内核。
GPIO 的复用:STM32F1 有很多的内置外设,这些外设的外部引脚都是与 GPIO 共用的。也就是说,一个引脚可以有很多作用,但是默认为 IO 口,如果想使用一个 GPIO 内置外设的功能引脚,就需要 GPIO 的复用,那么当这个 GPIO 作为内置外设使用的时候,就叫做复用。比如说串口就是 GPIO 复用为串口。
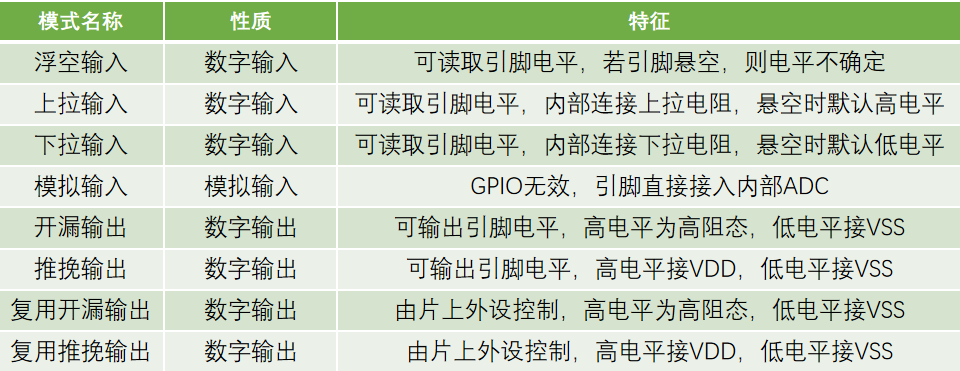
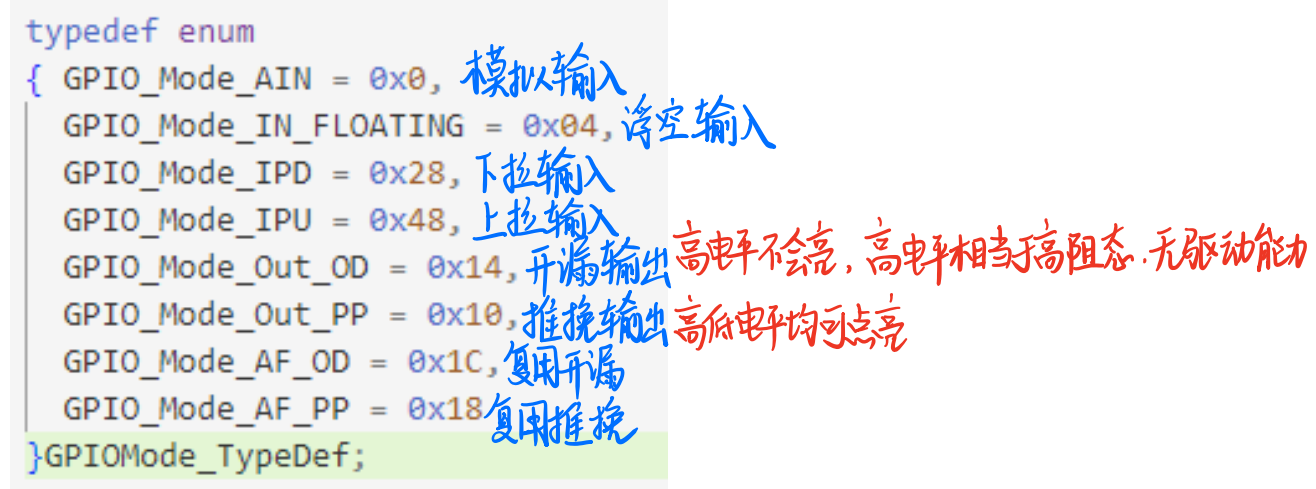
GPIO 可以被配置为 8 中状态,其中输入输出各 4 种状态。
输出模式:可控制端口输出高低电平,用以驱动LED、控制蜂鸣器、模拟通信协议输出时序等
1 通用推挽输出
2 通用开漏输出
3 复用功能推挽输出模式
4 复用功能开漏输出模式
输入模式:读取端口的高低电平或电压,用于读取按键输入、外接模块电平信号输入、ADC电压采集、模拟通信协议接收数据等
5 模拟输入模式
6 浮空输入模式
7 上拉输入模式
8 下拉输入模式
详述
结构
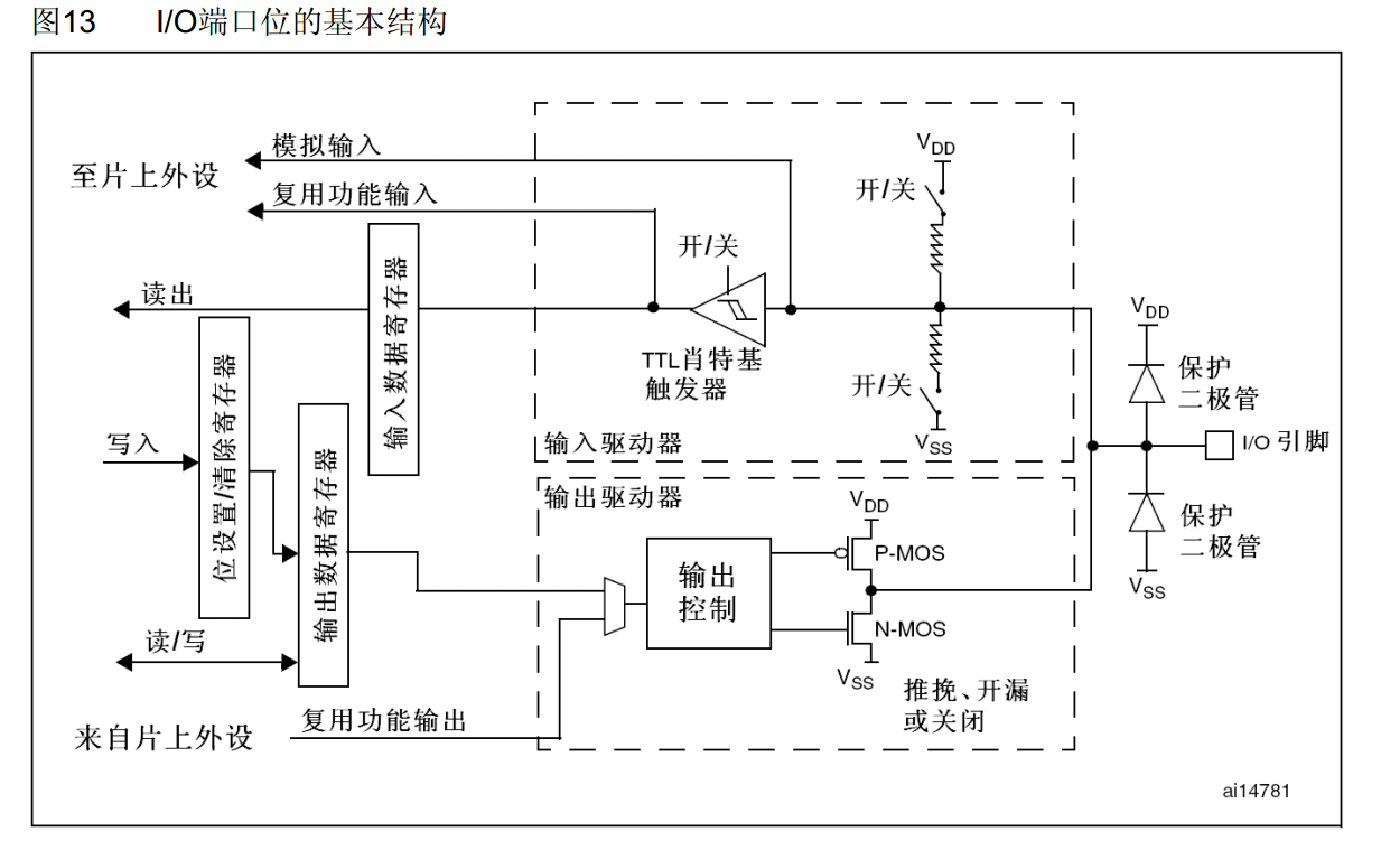
基本机构:
位结构:
GPIO模式:
通过配置GPIO的端口配置寄存器,端口可以配置成以下8种模式:
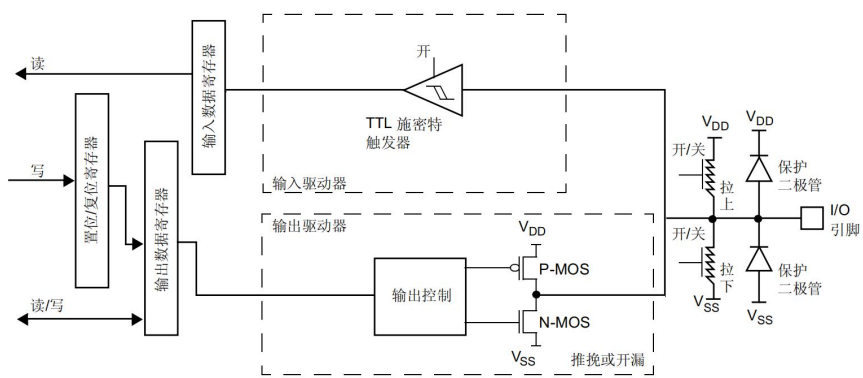
输出配置
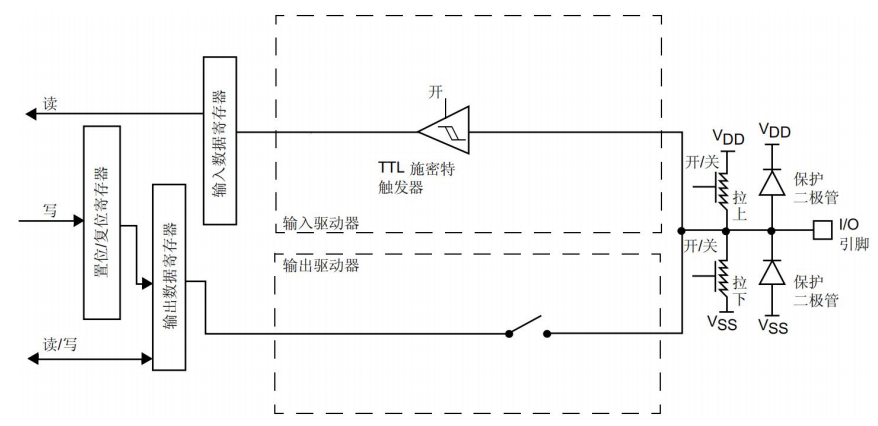
对 I/O 端口进行编程作为输出时:
1 输出缓冲器被打开:
–开漏模式:输出寄存器中的“0”可激活 N-MOS,而输出寄存器中的“1”会使端口保持高组态 (Hi-Z)(P-MOS 始终不激活)。
–推挽模式:输出寄存器中的“0”可激活 N-MOS,而输出寄存器中的“1”可激活 P-MOS。
2 施密特触发器输入被打开
3 根据 GPIOx_PUPDR 寄存器中的值决定是否打开弱上拉电阻和下拉电阻
4 输入数据寄存器每隔 1 个 AHB1 时钟周期对 I/O 引脚上的数据进行一次采样
5 对输入数据寄存器的读访问可获取 I/O 状态
6 对输出数据寄存器的读访问可获取最后的写入值
推挽电路(push-pull)就是两个不同极性晶体管间连接的输出电路。推挽电路采用两个参数相同的功率 BJT 管或 MOSFET 管,以推挽方式存在于电路中,各负责正负半周的波形放大任务,电路工作时,两只对称的功率开关管每次只有一个导通,所以导通损耗小效率高。推挽输出既可以向负载灌电流,也可以从负载抽取电流。
在电路设计中,推挽输出是一种很常用的输出模式。推挽输出有很多优点,比如更低的损耗,更安全的输出等。推挽”之意,即为当一个管子推出去时,另一个管子拉回来。输入不同,交替导通。
当输入信号为高电平的时候,上面的管子导通,下面的管子截止,输出信号为高电平。
当输入信号为低电平的时候,上面的管子截止,下面的管子导通,输出信号为低电平。
输入配置
对 I/O 端口进行编程作为输入时:
1 输出缓冲器被关闭
2 施密特触发器输入被打开
3 根据 GPIOx_PUPDR 寄存器中的值决定是否打开上拉和下拉电阻
4 输入数据寄存器每隔 1 个 AHB1 时钟周期对 I/O 引脚上的数据进行一次采样
5 对输入数据寄存器的读访问可获取 I/O 状态
复用功能配置
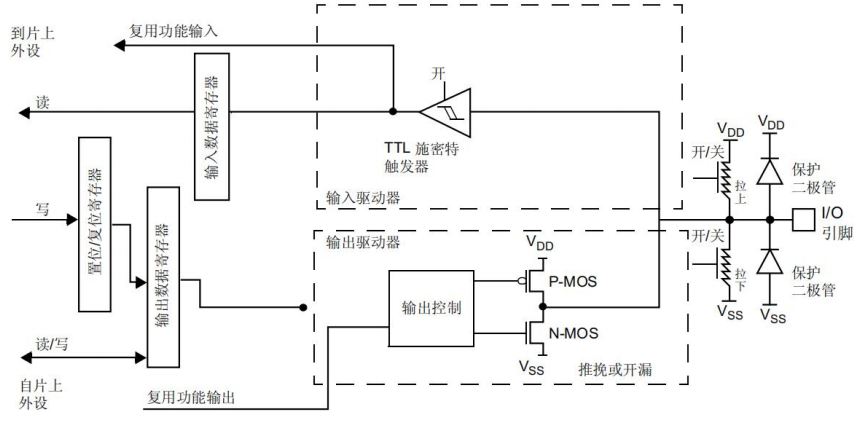
对 I/O 端口进行编程作为复用功能时:
1 可将输出缓冲器配置为开漏或推挽
2 输出缓冲器由来自外设的信号驱动(发送器使能和数据)
3 施密特触发器输入被打开
4 根据 GPIOx_PUPDR 寄存器中的值决定是否打开上拉电阻和下拉电阻
5 输入数据寄存器每隔 1 个 AHB1 时钟周期对 I/O 引脚上的数据进行一次采样
6 对输入数据寄存器的读访问可获取 I/O 状态
模拟配置
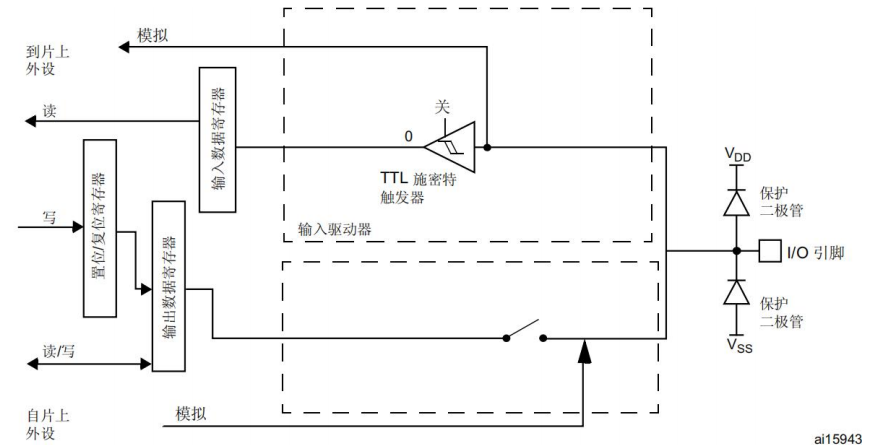
对 I/O 端口进行编程作为模拟配置时:
1 输出缓冲器被禁止。
2 施密特触发器输入停用,I/O 引脚的每个模拟输入的功耗变为零。施密特触发器的输出被强制处理为恒定值 (0)。
3 弱上拉和下拉电阻被关闭。
4 对输入数据寄存器的读访问值为“0”。
注:在模拟配置中,I/O 引脚不能为 5 V 容忍
GPIO 库函数编程
调用 GPIO 寄存器步骤总结:
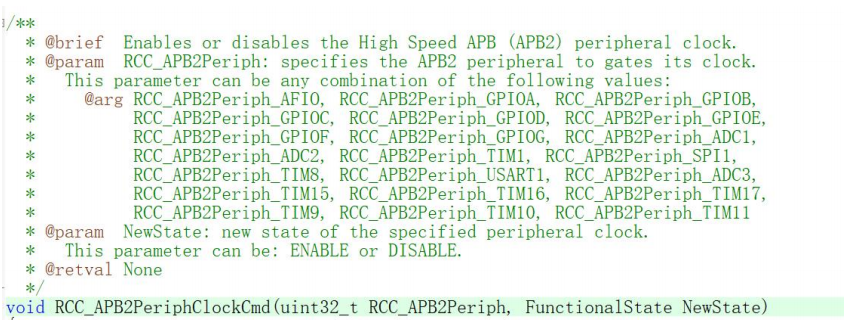
①端口硬件时钟使能
②GPIO 的初始化
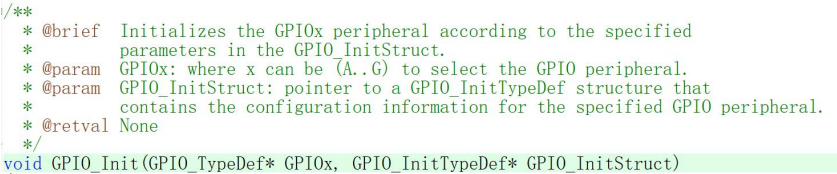
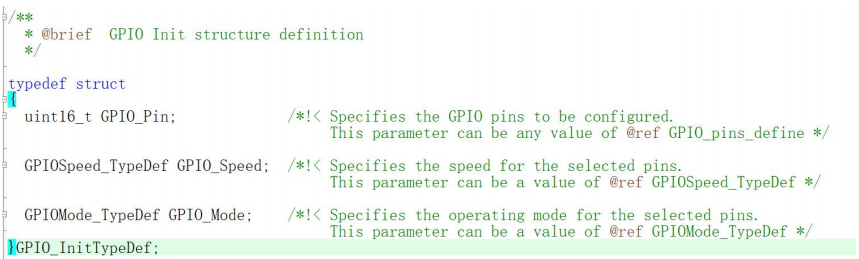
③GPIO 初始化结构体
④GPIO 的引脚电平设置
1 设置高电平
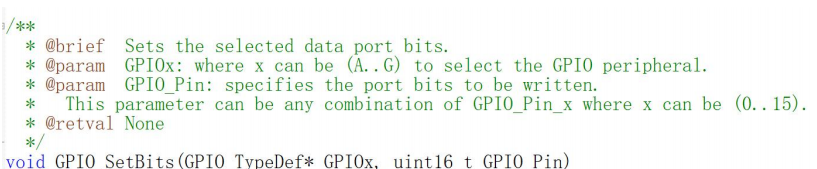
2 设置低电平
设置引脚电平,也可以尝试 GPIO_Write、GPIO_WriteBit 函数
3 读取某个端口的引脚电平
编程实例
LED闪烁
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
|
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
//使用各个外设前必须开启时钟,否则对外设的操作无效
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO引脚,赋值为第0号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数
//函数内部会自动根据结构体的参数配置相应寄存器
//实现GPIOA的初始化
/*主循环,循环体内的代码会一直循环执行*/
while (1)
{
/*设置PA0引脚的高低电平,实现LED闪烁,下面展示3种方法*/
/*方法1:GPIO_ResetBits设置低电平,GPIO_SetBits设置高电平*/
GPIO_ResetBits(GPIOA, GPIO_Pin_0); //将PA0引脚设置为低电平
Delay_ms(500); //延时500ms
GPIO_SetBits(GPIOA, GPIO_Pin_0); //将PA0引脚设置为高电平
Delay_ms(500); //延时500ms
/*方法2:GPIO_WriteBit设置低/高电平,由Bit_RESET/Bit_SET指定*/
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_RESET); //将PA0引脚设置为低电平
Delay_ms(500); //延时500ms
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET); //将PA0引脚设置为高电平
Delay_ms(500); //延时500ms
/*方法3:GPIO_WriteBit设置低/高电平,由数据0/1指定,数据需要强转为BitAction类型*/
GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)0); //将PA0引脚设置为低电平
Delay_ms(500); //延时500ms
GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)1); //将PA0引脚设置为高电平
Delay_ms(500); //延时500ms
}
}
|
LED流水灯
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
|
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
//使用各个外设前必须开启时钟,否则对外设的操作无效
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All; //GPIO引脚,赋值为所有引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数
//函数内部会自动根据结构体的参数配置相应寄存器
//实现GPIOA的初始化
/*主循环,循环体内的代码会一直循环执行*/
while (1)
{
/*使用GPIO_Write,同时设置GPIOA所有引脚的高低电平,实现LED流水灯*/
GPIO_Write(GPIOA, ~0x0001); //0000 0000 0000 0001,PA0引脚为低电平,其他引脚均为高电平,注意数据有按位取反
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0002); //0000 0000 0000 0010,PA1引脚为低电平,其他引脚均为高电平
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0004); //0000 0000 0000 0100,PA2引脚为低电平,其他引脚均为高电平
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0008); //0000 0000 0000 1000,PA3引脚为低电平,其他引脚均为高电平
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0010); //0000 0000 0001 0000,PA4引脚为低电平,其他引脚均为高电平
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0020); //0000 0000 0010 0000,PA5引脚为低电平,其他引脚均为高电平
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0040); //0000 0000 0100 0000,PA6引脚为低电平,其他引脚均为高电平
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0080); //0000 0000 1000 0000,PA7引脚为低电平,其他引脚均为高电平
Delay_ms(100); //延时100ms
}
}
|
蜂鸣器
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
//使用各个外设前必须开启时钟,否则对外设的操作无效
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //GPIO引脚,赋值为第12号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数
//函数内部会自动根据结构体的参数配置相应寄存器
//实现GPIOB的初始化
/*主循环,循环体内的代码会一直循环执行*/
while (1)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12); //将PB12引脚设置为低电平,蜂鸣器鸣叫
Delay_ms(100); //延时100ms
GPIO_SetBits(GPIOB, GPIO_Pin_12); //将PB12引脚设置为高电平,蜂鸣器停止
Delay_ms(100); //延时100ms
GPIO_ResetBits(GPIOB, GPIO_Pin_12); //将PB12引脚设置为低电平,蜂鸣器鸣叫
Delay_ms(100); //延时100ms
GPIO_SetBits(GPIOB, GPIO_Pin_12); //将PB12引脚设置为高电平,蜂鸣器停止
Delay_ms(700); //延时700ms
}
}
|
按键控制LED
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
|
//LED.c
#include "stm32f10x.h" // Device header
/**
* 函 数:LED初始化
* 参 数:无
* 返 回 值:无
*/
void LED_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA1和PA2引脚初始化为推挽输出
/*设置GPIO初始化后的默认电平*/
GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2); //设置PA1和PA2引脚为高电平
}
/**
* 函 数:LED1开启
* 参 数:无
* 返 回 值:无
*/
void LED1_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1); //设置PA1引脚为低电平
}
/**
* 函 数:LED1关闭
* 参 数:无
* 返 回 值:无
*/
void LED1_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_1); //设置PA1引脚为高电平
}
/**
* 函 数:LED1状态翻转
* 参 数:无
* 返 回 值:无
*/
void LED1_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0) //获取输出寄存器的状态,如果当前引脚输出低电平
{
GPIO_SetBits(GPIOA, GPIO_Pin_1); //则设置PA1引脚为高电平
}
else //否则,即当前引脚输出高电平
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1); //则设置PA1引脚为低电平
}
}
/**
* 函 数:LED2开启
* 参 数:无
* 返 回 值:无
*/
void LED2_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2); //设置PA2引脚为低电平
}
/**
* 函 数:LED2关闭
* 参 数:无
* 返 回 值:无
*/
void LED2_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_2); //设置PA2引脚为高电平
}
/**
* 函 数:LED2状态翻转
* 参 数:无
* 返 回 值:无
*/
void LED2_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0) //获取输出寄存器的状态,如果当前引脚输出低电平
{
GPIO_SetBits(GPIOA, GPIO_Pin_2); //则设置PA2引脚为高电平
}
else //否则,即当前引脚输出高电平
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2); //则设置PA2引脚为低电平
}
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
|
//Key.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
/**
* 函 数:按键初始化
* 参 数:无
* 返 回 值:无
*/
void Key_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB1和PB11引脚初始化为上拉输入
}
/**
* 函 数:按键获取键码
* 参 数:无
* 返 回 值:按下按键的键码值,范围:0~2,返回0代表没有按键按下
* 注意事项:此函数是阻塞式操作,当按键按住不放时,函数会卡住,直到按键松手
*/
uint8_t Key_GetNum(void)
{
uint8_t KeyNum = 0; //定义变量,默认键码值为0
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //读PB1输入寄存器的状态,如果为0,则代表按键1按下
{
Delay_ms(20); //延时消抖
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0); //等待按键松手
Delay_ms(20); //延时消抖
KeyNum = 1; //置键码为1
}
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0) //读PB11输入寄存器的状态,如果为0,则代表按键2按下
{
Delay_ms(20); //延时消抖
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0); //等待按键松手
Delay_ms(20); //延时消抖
KeyNum = 2; //置键码为2
}
return KeyNum; //返回键码值,如果没有按键按下,所有if都不成立,则键码为默认值0
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
|
//main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"
uint8_t KeyNum; //定义用于接收按键键码的变量
int main(void)
{
/*模块初始化*/
LED_Init(); //LED初始化
Key_Init(); //按键初始化
while (1)
{
KeyNum = Key_GetNum(); //获取按键键码
if (KeyNum == 1) //按键1按下
{
LED1_Turn(); //LED1翻转
}
if (KeyNum == 2) //按键2按下
{
LED2_Turn(); //LED2翻转
}
}
}
|
光敏传感器控制蜂鸣器
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
|
//LightSensor
#include "stm32f10x.h" // Device header
/**
* 函 数:光敏传感器初始化
* 参 数:无
* 返 回 值:无
*/
void LightSensor_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB13引脚初始化为上拉输入
}
/**
* 函 数:获取当前光敏传感器输出的高低电平
* 参 数:无
* 返 回 值:光敏传感器输出的高低电平,范围:0/1
*/
uint8_t LightSensor_Get(void)
{
return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13); //返回PB13输入寄存器的状态
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
|
//Buzz.c
#include "stm32f10x.h" // Device header
/**
* 函 数:蜂鸣器初始化
* 参 数:无
* 返 回 值:无
*/
void Buzzer_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB12引脚初始化为推挽输出
/*设置GPIO初始化后的默认电平*/
GPIO_SetBits(GPIOB, GPIO_Pin_12); //设置PB12引脚为高电平
}
/**
* 函 数:蜂鸣器开启
* 参 数:无
* 返 回 值:无
*/
void Buzzer_ON(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12); //设置PB12引脚为低电平
}
/**
* 函 数:蜂鸣器关闭
* 参 数:无
* 返 回 值:无
*/
void Buzzer_OFF(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_12); //设置PB12引脚为高电平
}
/**
* 函 数:蜂鸣器状态翻转
* 参 数:无
* 返 回 值:无
*/
void Buzzer_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_12) == 0) //获取输出寄存器的状态,如果当前引脚输出低电平
{
GPIO_SetBits(GPIOB, GPIO_Pin_12); //则设置PB12引脚为高电平
}
else //否则,即当前引脚输出高电平
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12); //则设置PB12引脚为低电平
}
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
|
//main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"
int main(void)
{
/*模块初始化*/
Buzzer_Init(); //蜂鸣器初始化
LightSensor_Init(); //光敏传感器初始化
while (1)
{
if (LightSensor_Get() == 1) //如果当前光敏输出1
{
Buzzer_ON(); //蜂鸣器开启
}
else //否则
{
Buzzer_OFF(); //蜂鸣器关闭
}
}
}
|